1. 均值漂移
均值漂移(Meanshif)是一种基于概率密度分布的跟踪算法,该算法一直沿着概率梯度上升的方向,迭代收敛到概率密度分布的局部峰值上,因此该算法可给出目标移动的方向。
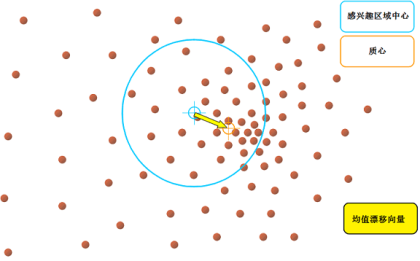
均值漂移在跟踪视频中感兴趣区域非常有用。例如:若预先不知道所要跟踪的区域,可采用这种巧妙的方法,开发程序来设定条件(颜色范围等),使应用能动态地开始(停止)跟踪视频的某些区域。
实际应用中,可采用训练好的SVM进行目标检测,同时使用均值漂移跟踪检测到的目标。
(1)程序源码
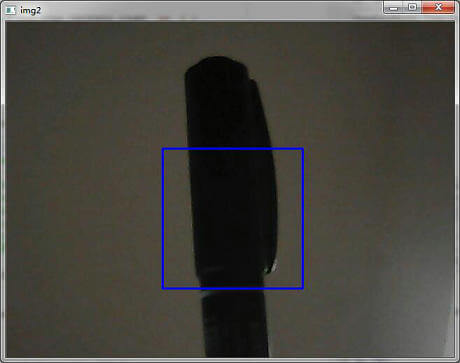
利用均值滤波窗口搜索指定颜色范围的物体,若指定颜色范围的目标进入窗口,则该窗口就会开始跟踪这个目标,否则窗口会抖动。
import numpy as np import cv2 cap = cv2.VideoCapture(0) # take first frame of the video ret,frame = cap.read() # setup initial location of window r,h,c,w = 10,200,10,200 # simply hardcoded the values track_window = (c,r,w,h) #提取ROI并将其转换为HSV色彩空间 roi = frame[r:r+h,c:c+w] hsv_roi = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) mask = cv2.inRange(hsv_roi, np.array((0., 0.,0.)), np.array((255.,255.,255.))) ''' hist = cv.calcHist(images, channels, mask, histSize, ranges[, hist[, accumulate]] ) Parameters images -> Source arrays. They all should have the same depth, CV_8U, CV_16U or CV_32F , and the same size. Each of them can have an arbitrary number of channels. channels -> List of the dims channels used to compute the histogram. The first array channels are numerated from 0 to images[0].channels()-1 , the second array channels are counted from images[0].channels() to images[0].channels() + images[1].channels()-1, and so on. mask -> Optional mask. If the matrix is not empty, it must be an 8-bit array of the same size as images[i] . The non-zero mask elements mark the array elements counted in the histogram. histSize -> Array of histogram sizes in each dimension. ranges -> Array of the dims arrays of the histogram bin boundaries in each dimension. When the histogram is uniform ( uniform =true), then for each dimension i it is enough to specify the lower (inclusive) boundary L0 of the 0-th histogram bin and the upper (exclusive) boundary UhistSize[i]−1 for the last histogram bin histSize[i]-1 . That is, in case of a uniform histogram each of ranges[i] is an array of 2 elements. When the histogram is not uniform ( uniform=false ), then each of ranges[i] contains histSize[i]+1 elements: L0,U0=L1,U1=L2,...,UhistSize[i]−2=LhistSize[i]−1,UhistSize[i]−1 . The array elements, that are not between L0 and UhistSize[i]−1 , are not counted in the histogram. hist -> Output histogram, which is a dense or sparse dims -dimensional array. accumulate -> Accumulation flag. If it is set, the histogram is not cleared in the beginning when it is allocated. This feature enables you to compute a single histogram from several sets of arrays, or to update the histogram in time. 用于计算图像roi_hist的彩色直方图。它的x轴是色彩值,y轴是相应色彩的像素值 ''' roi_hist = cv2.calcHist([hsv_roi],[0],mask,[180],[0,180]) cv2.normalize(roi_hist,roi_hist,0,255,cv2.NORM_MINMAX) #一种指定均值漂移终止系列计算行为的方式 term_crit = ( cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 1 ) while True: ret,frame = cap.read() if ret == True: #得到HSV数组 hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) ''' dst = cv.calcBackProject(images, channels, hist, ranges, scale[, dst] ) Parameters images -> Source arrays. They all should have the same depth, CV_8U, CV_16U or CV_32F , and the same size. Each of them can have an arbitrary number of channels. channels -> The list of channels used to compute the back projection. The number of channels must match the histogram dimensionality. The first array channels are numerated from 0 to images[0].channels()-1 , the second array channels are counted from images[0].channels() to images[0].channels() + images[1].channels()-1, and so on. hist -> Input histogram that can be dense or sparse. ranges -> Array of arrays of the histogram bin boundaries in each dimension. See calcHist . scale -> Optional scale factor for the output back projection. 直方图反向投影,其可得到直方图并将其投影到一幅图像上,其结果是概率,即每个像素属于起初那副生成直方图的图像概率。相当于等于或类似于模型图像,产生原始直方图图像的概率。 ''' dst = cv2.calcBackProject([hsv],[0],roi_hist,[0,180],1) #均值漂移算法 ret, track_window = cv2.meanShift(dst, track_window, term_crit) x,y,w,h = track_window img2 = cv2.rectangle(frame,(x,y),(x+w,y+h), 255,2) cv2.imshow('img2',img2) if cv2.waitKey(100) & 0xff == ord("q"): break else: break cv2.destroyAllWindows() cap.release()
(2)实验结果
2. CAMShift算法
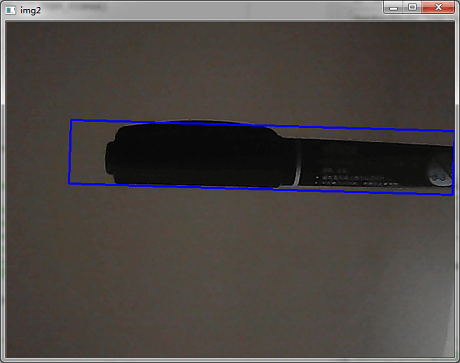
CamShift算法全称是“Continuously Adaptive Mean-Shift”(连续自适应MeanShift算法),是对MeanShift算法的改进算法,可随着跟踪目标的大小变化实时调整搜索窗口的大小,具有较好的跟踪效果。
(1)算法实现
Opencv中实现时,只需将上面例程中的meanShift()函数改为CAMShift()函数即可。
原始内容:
#均值漂移算法 ret, track_window = cv2.meanShift(dst, track_window, term_crit) x,y,w,h = track_window img2 = cv2.rectangle(frame,(x,y),(x+w,y+h), 255,2)
更改后内容:
#CAMShift算法 ret, track_window = cv2.CamShift(dst, track_window, term_crit) pts = cv2.boxPoints(ret) pts = np.int0(pts) img2 = cv2.polylines(frame,[pts],True, 255,2)
****(2)实验结果****
3. 算法总结
凡事皆有两面性,均值漂移算法和camshift算法都有各自的优势,自然也都有各自的劣势。
(1)均值漂移算法:简单,迭代次数少,但无法解决目标的遮挡问题并且不能适应运动目标的的形状和大小变化。
(2)camshift算法:可适应运动目标的大小形状的改变,具有较好的跟踪效果,但当背景色和目标颜色接近时,容易使目标的区域变大,最终有可能导致目标跟踪丢失。
参考:
[1] 《运动目标跟踪算法综述》