OpenCV可以检测图像的主要特征,然后提取这些特征,使其成为图像描述符,类似于人的眼睛与大脑。这些特征可作为图像搜索的数据库。
1. 特征定义
特征就是有意义的图像区域,该区域具有独特性或易于识别性。因此,角点及高密度区域是很好的特征,而大量重复的模式或低密度区域则非好的特征。
大多数特征检测算法都会涉及图像的角点、边和斑点的识别,也涉及一些脊向的概念。
2. 特征检测和提取算法
OpenCV中常用的特征检测和提取算法有如下六种:
(1)Harris:用于检测角点;
(2)SIFT:用于检测斑点;
(3)SURF:用于检测斑点;
(4)FAST:用于检测角点;
(5)BRIEF:用于检测斑点;
(6)ORB:表示带方向的FAST算法与具有旋转不变性的BRIEF算法;
本文将依次介绍以上算法的应用。
3. Harris
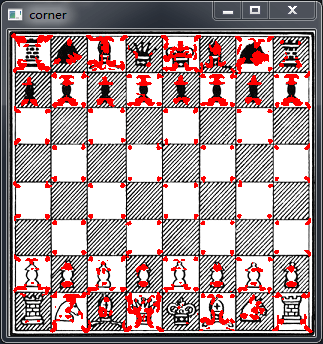
cornerHarris是一个非常简单方便实用的OpenCV函数,可用来检测图像的角点。
(1)应用举例
# -*- coding: utf-8 -*- """ Created on Sun Jun 24 10:05:04 2018 @author: lu """ import cv2 import numpy as np img = cv2.imread('./chess_board.png') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) gray = np.float32(gray) ''' https://docs.opencv.org/3.0-beta/modules/imgproc/doc/feature_detection.html?highlight=cornerharris#cv2.cornerHarris Python: cv2.cornerHarris(src, blockSize, ksize, k[, dst[, borderType]]) → dst Parameters: src – Input single-channel 8-bit or floating-point image. blockSize – Neighborhood size (see the details on cornerEigenValsAndVecs() ). ksize – Aperture parameter for the Sobel() operator. 3~31 k – Harris detector free parameter. See the formula below. borderType – Pixel extrapolation method. See borderInterpolate() . dst – Image to store the Harris detector responses. It has the type CV_32FC1 and the same size as src . ''' #blockSize:参数值越小,标记角点的记号越小 #注意ksize参数:定义了角点检测的敏感度 dst = cv2.cornerHarris(gray,5,23,0.04) img[dst>0.01*dst.max()]=[0,0,255] cv2.imshow('corner',img) cv2.waitKey() cv2.destroyAllWindows()
****(2)运行结果****
4. SIFT
尽管cornerHarris函数可以很好检测角点,然而如果减小(增大)图像的大小,则可能会丢失(增加)某些部分;也就是说,其检测效果很角点本身的特性有关。因此,需要一种与图像比例无关的角点检测方法,即:尺度不变特征变换(Scale-Invariant Feature Transform , SIFT)。
注:SIFT算法并不检测关键点,关键点由DoG(Difference of Gaussians)检测(DoG是对同一图像使用不同高斯滤波器所得到的结果),****SIFT算法是通过一个特征向量来描述关键点周围区域的情况。
应用举例:
#创建SIFT对象 sift = cv2.xfeatures2d.SIFT_create() ''' cv2.SIFT.detectAndCompute(image, mask[, descriptors[, useProvidedKeypoints]]) → keypoints, descriptors Parameters: img – Input 8-bit grayscale image mask – Optional input mask that marks the regions where we should detect features. keypoints – The input/output vector of keypoints descriptors – The output matrix of descriptors. Pass cv::noArray() if you do not need them. useProvidedKeypoints – Boolean flag. If it is true, the keypoint detector is not run. Instead, the provided vector of keypoints is used and the algorithm just computes their descriptors. ''' keypoints, descriptor = sift.detectAndCompute(gray,None) ''' Python: cv2.drawKeypoints(image, keypoints[, outImage[, color[, flags]]]) → outImage¶ Parameters: image – Source image. outImage – Output image. Its content depends on the flags value defining what is drawn in the output image. See possible flags bit values below. keypoints – Keypoints from the source image. flags – Flags setting drawing features. Possible flags bit values are defined by DrawMatchesFlags. See details above in drawMatches() . color – Color of keypoints. Note For Python API, flags are modified as cv2.DRAW_MATCHES_FLAGS_DEFAULT=0, cv2.DRAW_MATCHES_FLAGS_DRAW_OVER_OUTIMG=1, cv2.DRAW_MATCHES_FLAGS_NOT_DRAW_SINGLE_POINTS=2, cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS=4 ''' img = cv2.drawKeypoints(image=img, outImage=img, keypoints = keypoints, flags = cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS, color = (51, 163, 236))
5. SURF
SURF算法吸收了SIFT算法思想,其检测速度比SIFT快好几倍;不同的是SURF采用快速Hessian算法检测关键点,而SIFT则采用DoG和SIFT检测关键点并提取周围的特征。
应用举例:
cv2.xfeatures2d.SURF_create(8000), #Hessian阈值设为8000;阈值越高,能识别的特征就越少
6. FAST
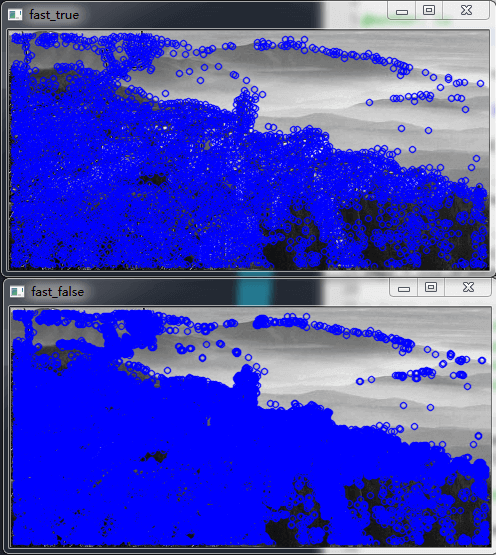
FAST (Features from Accelerated Segment Test) 算法会在像素周围绘制一个圆,该圆包括16个像素;然后,FAST会将每个像素值与加上某个阈值的圆心像素值进行比较,若存在N个连续的像素值比加上一个阈值的圆心的像素值还亮(暗),则可认为圆心是角点。详细介绍查看官网。
(1)应用举例:
# -*- coding: utf-8 -*- """ Created on Sun Jul 15 15:33:36 2018 @author: lu """ import numpy as np import cv2 from matplotlib import pyplot as plt img = cv2.imread("./varese.jpg",0) # Initiate FAST object with default values fast = cv2.FastFeatureDetector_create() # find and draw the keypoints kp = fast.detect(img,None) img2 = cv2.drawKeypoints(img,kp,img, color=(255,0,0)) # Print all default params print ("Threshold: ", fast.getThreshold()) #输出阈值 print ("nonmaxSuppression: ", fast.getNonmaxSuppression()) #是否使用非极大值抑制 print ("neighborhood: ", fast.getType()) print ("Total Keypoints with nonmaxSuppression: ", len(kp)) #特征点个数 # Disable nonmaxSuppression fast.setNonmaxSuppression(0) kp = fast.detect(img,None) print ("Total Keypoints without nonmaxSuppression: ", len(kp)) img3 = cv2.drawKeypoints(img,kp,img, color=(255,0,0)) cv2.imshow('fast_true', img2) cv2.imshow('fast_false', img3) while (True): if cv2.waitKey(100) & 0xff == ord("q"): break cv2.destroyAllWindows()
(2)运行结果
- BRIEF
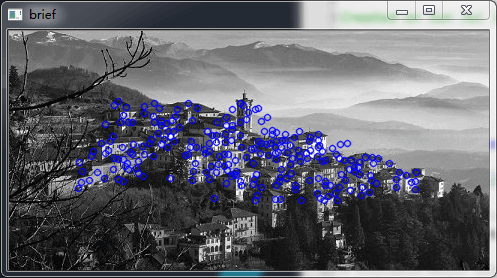
从某方面来说,BRIEF(Binary Robust Independent Elementary Features)并不是特征检测算法,它只是一个描述符。关于BRIEF算法介绍,请访问官网。
(1)应用举例
# -*- coding: utf-8 -*- """ Created on Sun Jul 15 15:59:57 2018 @author: lu """ import numpy as np import cv2 from matplotlib import pyplot as plt img = cv2.imread('./varese.jpg',0) # Initiate STAR detector star = cv2.xfeatures2d.StarDetector_create() # Initiate BRIEF extractor brief = cv2.xfeatures2d.BriefDescriptorExtractor_create() # find the keypoints with STAR kp = star.detect(img,None) # compute the descriptors with BRIEF kp, des = brief.compute(img, kp) print (brief.descriptorSize()) print (des.shape) img = cv2.drawKeypoints(img,kp,img, color=(255,0,0)) cv2.imshow('brief', img) while (True): if cv2.waitKey(100) & 0xff == ord("q"): break cv2.destroyAllWindows()
(2)运行结果
- ORB
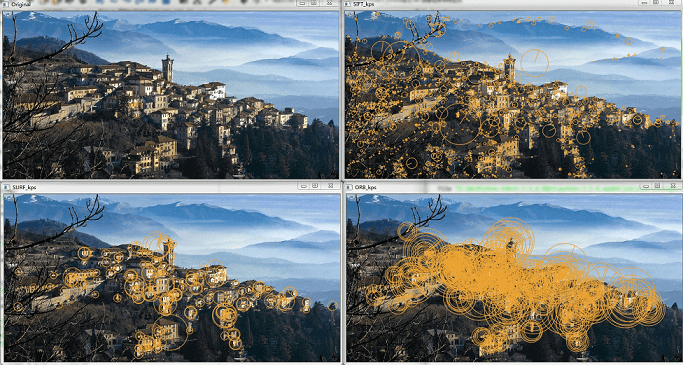
ORB的实现基于FAST关键点检测技术和基于BRIEF描述符的技术相结合。
与SIFT和SURF相比,ORB算法有更快的速度,其包括非常重要的一步:以旋转感知(rotation-aware)的方式使用BRIEF,这样即使在训练图像与查询图像之间旋转差别较大情况下,也可能够提高匹配。
注:关于ORB实现特征匹配,将在下一篇介绍。
(1)应用举例
# -*- coding: utf-8 -*- """ Created on Sun Jun 24 11:30:20 2018 @author: lu """ import cv2 import sys import numpy as np img = cv2.imread("./varese.jpg") def fd(algorithm): algorithms = { "SIFT": cv2.xfeatures2d.SIFT_create(), "SURF": cv2.xfeatures2d.SURF_create(8000), #Hessian阈值设为8000;阈值越高,能识别的特征就越少 "ORB": cv2.ORB_create() } return algorithms[algorithm] gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) #1.SITF算法 img1 = np.copy(img) fd_alg1 = fd("SIFT") keypoints, descriptor = fd_alg1.detectAndCompute(gray,None) img1 = cv2.drawKeypoints(image=img1, outImage=img1, keypoints = keypoints, flags = 4, color = (51, 163, 236)) #2.SURF算法 img2 = np.copy(img) fd_alg2 = fd("SURF") keypoints, descriptor = fd_alg2.detectAndCompute(gray,None) img2 = cv2.drawKeypoints(image=img2, outImage=img2, keypoints = keypoints, flags = 4, color = (51, 163, 236)) #3.ORB算法 img3 = np.copy(img) fd_alg3 = fd("ORB") keypoints, descriptor = fd_alg3.detectAndCompute(gray,None) img3 = cv2.drawKeypoints(image=img3, outImage=img3, keypoints = keypoints, flags = 4, color = (51, 163, 236)) cv2.imshow('Original', img) cv2.imshow('SIFT_kps', img1) cv2.imshow('SURF_kps', img2) cv2.imshow('ORB_kps', img3) while (True): if cv2.waitKey(100) & 0xff == ord("q"): break cv2.destroyAllWindows()
(2)运行效果
评论 (0)
暂无评论,快来抢沙发吧!